diff --git a/README.md b/README.md
index a1f30ab3..6da63322 100644
--- a/README.md
+++ b/README.md
@@ -1,4 +1,4 @@
- +
+ [](https://circleci.com/gh/facebookresearch/pytorch3d)
[](https://anaconda.org/pytorch3d/pytorch3d)
@@ -35,25 +35,25 @@ PyTorch3D is released under the [BSD License](LICENSE).
Get started with PyTorch3D by trying one of the tutorial notebooks.
-|
[](https://circleci.com/gh/facebookresearch/pytorch3d)
[](https://anaconda.org/pytorch3d/pytorch3d)
@@ -35,25 +35,25 @@ PyTorch3D is released under the [BSD License](LICENSE).
Get started with PyTorch3D by trying one of the tutorial notebooks.
-| |
| |
+|
|
+| |
| |
|:-----------------------------------------------------------------------------------------------------------:|:--------------------------------------------------:|
-| [Deform a sphere mesh to dolphin](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/deform_source_mesh_to_target_mesh.ipynb)| [Bundle adjustment](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/bundle_adjustment.ipynb) |
+| [Deform a sphere mesh to dolphin](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/deform_source_mesh_to_target_mesh.ipynb)| [Bundle adjustment](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/bundle_adjustment.ipynb) |
-|
|
|:-----------------------------------------------------------------------------------------------------------:|:--------------------------------------------------:|
-| [Deform a sphere mesh to dolphin](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/deform_source_mesh_to_target_mesh.ipynb)| [Bundle adjustment](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/bundle_adjustment.ipynb) |
+| [Deform a sphere mesh to dolphin](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/deform_source_mesh_to_target_mesh.ipynb)| [Bundle adjustment](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/bundle_adjustment.ipynb) |
-|  |
|  +|
+|  |
|  |:------------------------------------------------------------:|:--------------------------------------------------:|
-| [Render textured meshes](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/render_textured_meshes.ipynb)| [Camera position optimization](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/camera_position_optimization_with_differentiable_rendering.ipynb)|
+| [Render textured meshes](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/render_textured_meshes.ipynb)| [Camera position optimization](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/camera_position_optimization_with_differentiable_rendering.ipynb)|
-|
|:------------------------------------------------------------:|:--------------------------------------------------:|
-| [Render textured meshes](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/render_textured_meshes.ipynb)| [Camera position optimization](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/camera_position_optimization_with_differentiable_rendering.ipynb)|
+| [Render textured meshes](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/render_textured_meshes.ipynb)| [Camera position optimization](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/camera_position_optimization_with_differentiable_rendering.ipynb)|
-|  |
|  +|
+|  |
|  |:------------------------------------------------------------:|:--------------------------------------------------:|
-| [Render textured pointclouds](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/render_colored_points.ipynb)| [Fit a mesh with texture](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/fit_textured_mesh.ipynb)|
+| [Render textured pointclouds](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/render_colored_points.ipynb)| [Fit a mesh with texture](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/fit_textured_mesh.ipynb)|
-|
|:------------------------------------------------------------:|:--------------------------------------------------:|
-| [Render textured pointclouds](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/render_colored_points.ipynb)| [Fit a mesh with texture](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/fit_textured_mesh.ipynb)|
+| [Render textured pointclouds](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/render_colored_points.ipynb)| [Fit a mesh with texture](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/fit_textured_mesh.ipynb)|
-|  |
|  +|
+|  |
|  |:------------------------------------------------------------:|:--------------------------------------------------:|
-| [Render DensePose data](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/render_densepose.ipynb)| [Load & Render ShapeNet data](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/dataloaders_ShapeNetCore_R2N2.ipynb)|
+| [Render DensePose data](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/render_densepose.ipynb)| [Load & Render ShapeNet data](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/dataloaders_ShapeNetCore_R2N2.ipynb)|
-|
|:------------------------------------------------------------:|:--------------------------------------------------:|
-| [Render DensePose data](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/render_densepose.ipynb)| [Load & Render ShapeNet data](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/dataloaders_ShapeNetCore_R2N2.ipynb)|
+| [Render DensePose data](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/render_densepose.ipynb)| [Load & Render ShapeNet data](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/dataloaders_ShapeNetCore_R2N2.ipynb)|
-|  |
|  +|
+|  |
|  |:------------------------------------------------------------:|:--------------------------------------------------:|
-| [Fit Textured Volume](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/fit_textured_volume.ipynb)| [Fit A Simple Neural Radiance Field](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/fit_simple_neural_radiance_field.ipynb)|
+| [Fit Textured Volume](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/fit_textured_volume.ipynb)| [Fit A Simple Neural Radiance Field](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/fit_simple_neural_radiance_field.ipynb)|
@@ -64,9 +64,9 @@ Learn more about the API by reading the PyTorch3D [documentation](https://pytorc
We also have deep dive notes on several API components:
-- [Heterogeneous Batching](https://github.com/facebookresearch/pytorch3d/tree/master/docs/notes/batching.md)
-- [Mesh IO](https://github.com/facebookresearch/pytorch3d/tree/master/docs/notes/meshes_io.md)
-- [Differentiable Rendering](https://github.com/facebookresearch/pytorch3d/tree/master/docs/notes/renderer_getting_started.md)
+- [Heterogeneous Batching](https://github.com/facebookresearch/pytorch3d/tree/main/docs/notes/batching.md)
+- [Mesh IO](https://github.com/facebookresearch/pytorch3d/tree/main/docs/notes/meshes_io.md)
+- [Differentiable Rendering](https://github.com/facebookresearch/pytorch3d/tree/main/docs/notes/renderer_getting_started.md)
### Overview Video
@@ -129,7 +129,7 @@ If you are using the pulsar backend for sphere-rendering (the `PulsarPointRender
Please see below for a timeline of the codebase updates in reverse chronological order. We are sharing updates on the releases as well as research projects which are built with PyTorch3D. The changelogs for the releases are available under [`Releases`](https://github.com/facebookresearch/pytorch3d/releases), and the builds can be installed using `conda` as per the instructions in [INSTALL.md](INSTALL.md).
-**[Feb 9th 2021]:** PyTorch3D [v0.4.0](https://github.com/facebookresearch/pytorch3d/releases/tag/v0.4.0) released with support for implicit functions, volume rendering and a [reimplementation of NeRF](https://github.com/facebookresearch/pytorch3d/tree/master/projects/nerf).
+**[Feb 9th 2021]:** PyTorch3D [v0.4.0](https://github.com/facebookresearch/pytorch3d/releases/tag/v0.4.0) released with support for implicit functions, volume rendering and a [reimplementation of NeRF](https://github.com/facebookresearch/pytorch3d/tree/main/projects/nerf).
**[November 2nd 2020]:** PyTorch3D [v0.3.0](https://github.com/facebookresearch/pytorch3d/releases/tag/v0.3.0) released, integrating the pulsar backend.
diff --git a/docs/conf.py b/docs/conf.py
index b2e87e9e..77d21fdb 100644
--- a/docs/conf.py
+++ b/docs/conf.py
@@ -159,7 +159,7 @@ html_theme_options = {"collapse_navigation": True}
def url_resolver(url):
if ".html" not in url:
url = url.replace("../", "")
- return "https://github.com/facebookresearch/pytorch3d/blob/master/" + url
+ return "https://github.com/facebookresearch/pytorch3d/blob/main/" + url
else:
if DEPLOY:
return "http://pytorch3d.readthedocs.io/" + url
diff --git a/docs/notes/batching.md b/docs/notes/batching.md
index 1c7ca56b..9aa9943e 100644
--- a/docs/notes/batching.md
+++ b/docs/notes/batching.md
@@ -26,7 +26,7 @@ The need for different mesh batch modes is inherent to the way PyTorch operators
|:------------------------------------------------------------:|:--------------------------------------------------:|
-| [Fit Textured Volume](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/fit_textured_volume.ipynb)| [Fit A Simple Neural Radiance Field](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/fit_simple_neural_radiance_field.ipynb)|
+| [Fit Textured Volume](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/fit_textured_volume.ipynb)| [Fit A Simple Neural Radiance Field](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/fit_simple_neural_radiance_field.ipynb)|
@@ -64,9 +64,9 @@ Learn more about the API by reading the PyTorch3D [documentation](https://pytorc
We also have deep dive notes on several API components:
-- [Heterogeneous Batching](https://github.com/facebookresearch/pytorch3d/tree/master/docs/notes/batching.md)
-- [Mesh IO](https://github.com/facebookresearch/pytorch3d/tree/master/docs/notes/meshes_io.md)
-- [Differentiable Rendering](https://github.com/facebookresearch/pytorch3d/tree/master/docs/notes/renderer_getting_started.md)
+- [Heterogeneous Batching](https://github.com/facebookresearch/pytorch3d/tree/main/docs/notes/batching.md)
+- [Mesh IO](https://github.com/facebookresearch/pytorch3d/tree/main/docs/notes/meshes_io.md)
+- [Differentiable Rendering](https://github.com/facebookresearch/pytorch3d/tree/main/docs/notes/renderer_getting_started.md)
### Overview Video
@@ -129,7 +129,7 @@ If you are using the pulsar backend for sphere-rendering (the `PulsarPointRender
Please see below for a timeline of the codebase updates in reverse chronological order. We are sharing updates on the releases as well as research projects which are built with PyTorch3D. The changelogs for the releases are available under [`Releases`](https://github.com/facebookresearch/pytorch3d/releases), and the builds can be installed using `conda` as per the instructions in [INSTALL.md](INSTALL.md).
-**[Feb 9th 2021]:** PyTorch3D [v0.4.0](https://github.com/facebookresearch/pytorch3d/releases/tag/v0.4.0) released with support for implicit functions, volume rendering and a [reimplementation of NeRF](https://github.com/facebookresearch/pytorch3d/tree/master/projects/nerf).
+**[Feb 9th 2021]:** PyTorch3D [v0.4.0](https://github.com/facebookresearch/pytorch3d/releases/tag/v0.4.0) released with support for implicit functions, volume rendering and a [reimplementation of NeRF](https://github.com/facebookresearch/pytorch3d/tree/main/projects/nerf).
**[November 2nd 2020]:** PyTorch3D [v0.3.0](https://github.com/facebookresearch/pytorch3d/releases/tag/v0.3.0) released, integrating the pulsar backend.
diff --git a/docs/conf.py b/docs/conf.py
index b2e87e9e..77d21fdb 100644
--- a/docs/conf.py
+++ b/docs/conf.py
@@ -159,7 +159,7 @@ html_theme_options = {"collapse_navigation": True}
def url_resolver(url):
if ".html" not in url:
url = url.replace("../", "")
- return "https://github.com/facebookresearch/pytorch3d/blob/master/" + url
+ return "https://github.com/facebookresearch/pytorch3d/blob/main/" + url
else:
if DEPLOY:
return "http://pytorch3d.readthedocs.io/" + url
diff --git a/docs/notes/batching.md b/docs/notes/batching.md
index 1c7ca56b..9aa9943e 100644
--- a/docs/notes/batching.md
+++ b/docs/notes/batching.md
@@ -26,7 +26,7 @@ The need for different mesh batch modes is inherent to the way PyTorch operators
 -[meshes]: https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/structures/meshes.py
-[graphconv]: https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/ops/graph_conv.py
-[vert_align]: https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/ops/vert_align.py
+[meshes]: https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/structures/meshes.py
+[graphconv]: https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/ops/graph_conv.py
+[vert_align]: https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/ops/vert_align.py
[meshrcnn]: https://github.com/facebookresearch/meshrcnn
diff --git a/docs/notes/cubify.md b/docs/notes/cubify.md
index 8a63fe83..41f8ecdf 100644
--- a/docs/notes/cubify.md
+++ b/docs/notes/cubify.md
@@ -5,7 +5,7 @@ sidebar_label: Cubify
# Cubify
-The [cubify operator](https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/ops/cubify.py) converts an 3D occupancy grid of shape `BxDxHxW`, where `B` is the batch size, into a mesh instantiated as a [Meshes](https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/structures/meshes.py) data structure of `B` elements. The operator replaces every occupied voxel (if its occupancy probability is greater than a user defined threshold) with a cuboid of 12 faces and 8 vertices. Shared vertices are merged, and internal faces are removed resulting in a **watertight** mesh.
+The [cubify operator](https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/ops/cubify.py) converts an 3D occupancy grid of shape `BxDxHxW`, where `B` is the batch size, into a mesh instantiated as a [Meshes](https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/structures/meshes.py) data structure of `B` elements. The operator replaces every occupied voxel (if its occupancy probability is greater than a user defined threshold) with a cuboid of 12 faces and 8 vertices. Shared vertices are merged, and internal faces are removed resulting in a **watertight** mesh.
The operator provides three alignment modes {*topleft*, *corner*, *center*} which define the span of the mesh vertices with respect to the voxel grid. The alignment modes are described in the figure below for a 2D grid.
diff --git a/docs/notes/datasets.md b/docs/notes/datasets.md
index f090618d..ee3588f2 100644
--- a/docs/notes/datasets.md
+++ b/docs/notes/datasets.md
@@ -9,12 +9,12 @@ sidebar_label: Data loaders
ShapeNet is a dataset of 3D CAD models. ShapeNetCore is a subset of the ShapeNet dataset and can be downloaded from https://www.shapenet.org/. There are two versions ShapeNetCore: v1 (55 categories) and v2 (57 categories).
-The PyTorch3D [ShapeNetCore data loader](https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/datasets/shapenet/shapenet_core.py) inherits from `torch.utils.data.Dataset`. It takes the path where the ShapeNetCore dataset is stored locally and loads models in the dataset. The ShapeNetCore class loads and returns models with their `categories`, `model_ids`, `vertices` and `faces`. The `ShapeNetCore` data loader also has a customized `render` function that renders models by the specified `model_ids (List[int])`, `categories (List[str])` or `indices (List[int])` with PyTorch3D's differentiable renderer.
+The PyTorch3D [ShapeNetCore data loader](https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/datasets/shapenet/shapenet_core.py) inherits from `torch.utils.data.Dataset`. It takes the path where the ShapeNetCore dataset is stored locally and loads models in the dataset. The ShapeNetCore class loads and returns models with their `categories`, `model_ids`, `vertices` and `faces`. The `ShapeNetCore` data loader also has a customized `render` function that renders models by the specified `model_ids (List[int])`, `categories (List[str])` or `indices (List[int])` with PyTorch3D's differentiable renderer.
-The loaded dataset can be passed to `torch.utils.data.DataLoader` with PyTorch3D's customized collate_fn: `collate_batched_meshes` from the `pytorch3d.dataset.utils` module. The `vertices` and `faces` of the models are used to construct a [Meshes](https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/structures/meshes.py) object representing the batched meshes. This `Meshes` representation can be easily used with other ops and rendering in PyTorch3D.
+The loaded dataset can be passed to `torch.utils.data.DataLoader` with PyTorch3D's customized collate_fn: `collate_batched_meshes` from the `pytorch3d.dataset.utils` module. The `vertices` and `faces` of the models are used to construct a [Meshes](https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/structures/meshes.py) object representing the batched meshes. This `Meshes` representation can be easily used with other ops and rendering in PyTorch3D.
### R2N2
The R2N2 dataset contains 13 categories that are a subset of the ShapeNetCore v.1 dataset. The R2N2 dataset also contains its own 24 renderings of each object and voxelized models. The R2N2 Dataset can be downloaded following the instructions [here](http://3d-r2n2.stanford.edu/).
-The PyTorch3D [R2N2 data loader](https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/datasets/r2n2/r2n2.py) is initialized with the paths to the ShapeNet dataset, the R2N2 dataset and the splits file for R2N2. Just like `ShapeNetCore`, it can be passed to `torch.utils.data.DataLoader` with a customized collate_fn: `collate_batched_R2N2` from the `pytorch3d.dataset.r2n2.utils` module. It returns all the data that `ShapeNetCore` returns, and in addition, it returns the R2N2 renderings (24 views for each model) along with the camera calibration matrices and a voxel representation for each model. Similar to `ShapeNetCore`, it has a customized `render` function that supports rendering specified models with the PyTorch3D differentiable renderer. In addition, it supports rendering models with the same orientations as R2N2's original renderings.
+The PyTorch3D [R2N2 data loader](https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/datasets/r2n2/r2n2.py) is initialized with the paths to the ShapeNet dataset, the R2N2 dataset and the splits file for R2N2. Just like `ShapeNetCore`, it can be passed to `torch.utils.data.DataLoader` with a customized collate_fn: `collate_batched_R2N2` from the `pytorch3d.dataset.r2n2.utils` module. It returns all the data that `ShapeNetCore` returns, and in addition, it returns the R2N2 renderings (24 views for each model) along with the camera calibration matrices and a voxel representation for each model. Similar to `ShapeNetCore`, it has a customized `render` function that supports rendering specified models with the PyTorch3D differentiable renderer. In addition, it supports rendering models with the same orientations as R2N2's original renderings.
diff --git a/docs/notes/renderer_getting_started.md b/docs/notes/renderer_getting_started.md
index 6da9eb8f..21a480a9 100644
--- a/docs/notes/renderer_getting_started.md
+++ b/docs/notes/renderer_getting_started.md
@@ -74,7 +74,7 @@ Since v0.3, [pulsar](https://arxiv.org/abs/2004.07484) can be used as a backend
-[meshes]: https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/structures/meshes.py
-[graphconv]: https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/ops/graph_conv.py
-[vert_align]: https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/ops/vert_align.py
+[meshes]: https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/structures/meshes.py
+[graphconv]: https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/ops/graph_conv.py
+[vert_align]: https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/ops/vert_align.py
[meshrcnn]: https://github.com/facebookresearch/meshrcnn
diff --git a/docs/notes/cubify.md b/docs/notes/cubify.md
index 8a63fe83..41f8ecdf 100644
--- a/docs/notes/cubify.md
+++ b/docs/notes/cubify.md
@@ -5,7 +5,7 @@ sidebar_label: Cubify
# Cubify
-The [cubify operator](https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/ops/cubify.py) converts an 3D occupancy grid of shape `BxDxHxW`, where `B` is the batch size, into a mesh instantiated as a [Meshes](https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/structures/meshes.py) data structure of `B` elements. The operator replaces every occupied voxel (if its occupancy probability is greater than a user defined threshold) with a cuboid of 12 faces and 8 vertices. Shared vertices are merged, and internal faces are removed resulting in a **watertight** mesh.
+The [cubify operator](https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/ops/cubify.py) converts an 3D occupancy grid of shape `BxDxHxW`, where `B` is the batch size, into a mesh instantiated as a [Meshes](https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/structures/meshes.py) data structure of `B` elements. The operator replaces every occupied voxel (if its occupancy probability is greater than a user defined threshold) with a cuboid of 12 faces and 8 vertices. Shared vertices are merged, and internal faces are removed resulting in a **watertight** mesh.
The operator provides three alignment modes {*topleft*, *corner*, *center*} which define the span of the mesh vertices with respect to the voxel grid. The alignment modes are described in the figure below for a 2D grid.
diff --git a/docs/notes/datasets.md b/docs/notes/datasets.md
index f090618d..ee3588f2 100644
--- a/docs/notes/datasets.md
+++ b/docs/notes/datasets.md
@@ -9,12 +9,12 @@ sidebar_label: Data loaders
ShapeNet is a dataset of 3D CAD models. ShapeNetCore is a subset of the ShapeNet dataset and can be downloaded from https://www.shapenet.org/. There are two versions ShapeNetCore: v1 (55 categories) and v2 (57 categories).
-The PyTorch3D [ShapeNetCore data loader](https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/datasets/shapenet/shapenet_core.py) inherits from `torch.utils.data.Dataset`. It takes the path where the ShapeNetCore dataset is stored locally and loads models in the dataset. The ShapeNetCore class loads and returns models with their `categories`, `model_ids`, `vertices` and `faces`. The `ShapeNetCore` data loader also has a customized `render` function that renders models by the specified `model_ids (List[int])`, `categories (List[str])` or `indices (List[int])` with PyTorch3D's differentiable renderer.
+The PyTorch3D [ShapeNetCore data loader](https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/datasets/shapenet/shapenet_core.py) inherits from `torch.utils.data.Dataset`. It takes the path where the ShapeNetCore dataset is stored locally and loads models in the dataset. The ShapeNetCore class loads and returns models with their `categories`, `model_ids`, `vertices` and `faces`. The `ShapeNetCore` data loader also has a customized `render` function that renders models by the specified `model_ids (List[int])`, `categories (List[str])` or `indices (List[int])` with PyTorch3D's differentiable renderer.
-The loaded dataset can be passed to `torch.utils.data.DataLoader` with PyTorch3D's customized collate_fn: `collate_batched_meshes` from the `pytorch3d.dataset.utils` module. The `vertices` and `faces` of the models are used to construct a [Meshes](https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/structures/meshes.py) object representing the batched meshes. This `Meshes` representation can be easily used with other ops and rendering in PyTorch3D.
+The loaded dataset can be passed to `torch.utils.data.DataLoader` with PyTorch3D's customized collate_fn: `collate_batched_meshes` from the `pytorch3d.dataset.utils` module. The `vertices` and `faces` of the models are used to construct a [Meshes](https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/structures/meshes.py) object representing the batched meshes. This `Meshes` representation can be easily used with other ops and rendering in PyTorch3D.
### R2N2
The R2N2 dataset contains 13 categories that are a subset of the ShapeNetCore v.1 dataset. The R2N2 dataset also contains its own 24 renderings of each object and voxelized models. The R2N2 Dataset can be downloaded following the instructions [here](http://3d-r2n2.stanford.edu/).
-The PyTorch3D [R2N2 data loader](https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/datasets/r2n2/r2n2.py) is initialized with the paths to the ShapeNet dataset, the R2N2 dataset and the splits file for R2N2. Just like `ShapeNetCore`, it can be passed to `torch.utils.data.DataLoader` with a customized collate_fn: `collate_batched_R2N2` from the `pytorch3d.dataset.r2n2.utils` module. It returns all the data that `ShapeNetCore` returns, and in addition, it returns the R2N2 renderings (24 views for each model) along with the camera calibration matrices and a voxel representation for each model. Similar to `ShapeNetCore`, it has a customized `render` function that supports rendering specified models with the PyTorch3D differentiable renderer. In addition, it supports rendering models with the same orientations as R2N2's original renderings.
+The PyTorch3D [R2N2 data loader](https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/datasets/r2n2/r2n2.py) is initialized with the paths to the ShapeNet dataset, the R2N2 dataset and the splits file for R2N2. Just like `ShapeNetCore`, it can be passed to `torch.utils.data.DataLoader` with a customized collate_fn: `collate_batched_R2N2` from the `pytorch3d.dataset.r2n2.utils` module. It returns all the data that `ShapeNetCore` returns, and in addition, it returns the R2N2 renderings (24 views for each model) along with the camera calibration matrices and a voxel representation for each model. Similar to `ShapeNetCore`, it has a customized `render` function that supports rendering specified models with the PyTorch3D differentiable renderer. In addition, it supports rendering models with the same orientations as R2N2's original renderings.
diff --git a/docs/notes/renderer_getting_started.md b/docs/notes/renderer_getting_started.md
index 6da9eb8f..21a480a9 100644
--- a/docs/notes/renderer_getting_started.md
+++ b/docs/notes/renderer_getting_started.md
@@ -74,7 +74,7 @@ Since v0.3, [pulsar](https://arxiv.org/abs/2004.07484) can be used as a backend
 -Pulsar's processing steps are tightly integrated CUDA kernels and do not work with custom `rasterizer` and `compositor` components. We provide two ways to use Pulsar: (1) there is a unified interface to match the PyTorch3D calling convention seamlessly. This is, for example, illustrated in the [point cloud tutorial](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/render_colored_points.ipynb). (2) There is a direct interface available to the pulsar backend, which exposes the full functionality of the backend (including opacity, which is not yet available in PyTorch3D). Examples showing its use as well as the matching PyTorch3D interface code are available in [this folder](https://github.com/facebookresearch/pytorch3d/tree/master/docs/examples).
+Pulsar's processing steps are tightly integrated CUDA kernels and do not work with custom `rasterizer` and `compositor` components. We provide two ways to use Pulsar: (1) there is a unified interface to match the PyTorch3D calling convention seamlessly. This is, for example, illustrated in the [point cloud tutorial](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/render_colored_points.ipynb). (2) There is a direct interface available to the pulsar backend, which exposes the full functionality of the backend (including opacity, which is not yet available in PyTorch3D). Examples showing its use as well as the matching PyTorch3D interface code are available in [this folder](https://github.com/facebookresearch/pytorch3d/tree/master/docs/examples).
---
@@ -84,7 +84,7 @@ For mesh texturing we offer several options (in `pytorch3d/renderer/mesh/texturi
1. **Vertex Textures**: D dimensional textures for each vertex (for example an RGB color) which can be interpolated across the face. This can be represented as an `(N, V, D)` tensor. This is a fairly simple representation though and cannot model complex textures if the mesh faces are large.
2. **UV Textures**: vertex UV coordinates and **one** texture map for the whole mesh. For a point on a face with given barycentric coordinates, the face color can be computed by interpolating the vertex uv coordinates and then sampling from the texture map. This representation requires two tensors (UVs: `(N, V, 2), Texture map: `(N, H, W, 3)`), and is limited to only support one texture map per mesh.
-3. **Face Textures**: In more complex cases such as ShapeNet meshes, there are multiple texture maps per mesh and some faces have texture while other do not. For these cases, a more flexible representation is a texture atlas, where each face is represented as an `(RxR)` texture map where R is the texture resolution. For a given point on the face, the texture value can be sampled from the per face texture map using the barycentric coordinates of the point. This representation requires one tensor of shape `(N, F, R, R, 3)`. This texturing method is inspired by the SoftRasterizer implementation. For more details refer to the [`make_material_atlas`](https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/io/mtl_io.py#L123) and [`sample_textures`](https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/renderer/mesh/textures.py#L452) functions. **NOTE:**: The `TexturesAtlas` texture sampling is only differentiable with respect to the texture atlas but not differentiable with respect to the barycentric coordinates.
+3. **Face Textures**: In more complex cases such as ShapeNet meshes, there are multiple texture maps per mesh and some faces have texture while other do not. For these cases, a more flexible representation is a texture atlas, where each face is represented as an `(RxR)` texture map where R is the texture resolution. For a given point on the face, the texture value can be sampled from the per face texture map using the barycentric coordinates of the point. This representation requires one tensor of shape `(N, F, R, R, 3)`. This texturing method is inspired by the SoftRasterizer implementation. For more details refer to the [`make_material_atlas`](https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/io/mtl_io.py#L123) and [`sample_textures`](https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/renderer/mesh/textures.py#L452) functions. **NOTE:**: The `TexturesAtlas` texture sampling is only differentiable with respect to the texture atlas but not differentiable with respect to the barycentric coordinates.
-Pulsar's processing steps are tightly integrated CUDA kernels and do not work with custom `rasterizer` and `compositor` components. We provide two ways to use Pulsar: (1) there is a unified interface to match the PyTorch3D calling convention seamlessly. This is, for example, illustrated in the [point cloud tutorial](https://github.com/facebookresearch/pytorch3d/blob/master/docs/tutorials/render_colored_points.ipynb). (2) There is a direct interface available to the pulsar backend, which exposes the full functionality of the backend (including opacity, which is not yet available in PyTorch3D). Examples showing its use as well as the matching PyTorch3D interface code are available in [this folder](https://github.com/facebookresearch/pytorch3d/tree/master/docs/examples).
+Pulsar's processing steps are tightly integrated CUDA kernels and do not work with custom `rasterizer` and `compositor` components. We provide two ways to use Pulsar: (1) there is a unified interface to match the PyTorch3D calling convention seamlessly. This is, for example, illustrated in the [point cloud tutorial](https://github.com/facebookresearch/pytorch3d/blob/main/docs/tutorials/render_colored_points.ipynb). (2) There is a direct interface available to the pulsar backend, which exposes the full functionality of the backend (including opacity, which is not yet available in PyTorch3D). Examples showing its use as well as the matching PyTorch3D interface code are available in [this folder](https://github.com/facebookresearch/pytorch3d/tree/master/docs/examples).
---
@@ -84,7 +84,7 @@ For mesh texturing we offer several options (in `pytorch3d/renderer/mesh/texturi
1. **Vertex Textures**: D dimensional textures for each vertex (for example an RGB color) which can be interpolated across the face. This can be represented as an `(N, V, D)` tensor. This is a fairly simple representation though and cannot model complex textures if the mesh faces are large.
2. **UV Textures**: vertex UV coordinates and **one** texture map for the whole mesh. For a point on a face with given barycentric coordinates, the face color can be computed by interpolating the vertex uv coordinates and then sampling from the texture map. This representation requires two tensors (UVs: `(N, V, 2), Texture map: `(N, H, W, 3)`), and is limited to only support one texture map per mesh.
-3. **Face Textures**: In more complex cases such as ShapeNet meshes, there are multiple texture maps per mesh and some faces have texture while other do not. For these cases, a more flexible representation is a texture atlas, where each face is represented as an `(RxR)` texture map where R is the texture resolution. For a given point on the face, the texture value can be sampled from the per face texture map using the barycentric coordinates of the point. This representation requires one tensor of shape `(N, F, R, R, 3)`. This texturing method is inspired by the SoftRasterizer implementation. For more details refer to the [`make_material_atlas`](https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/io/mtl_io.py#L123) and [`sample_textures`](https://github.com/facebookresearch/pytorch3d/blob/master/pytorch3d/renderer/mesh/textures.py#L452) functions. **NOTE:**: The `TexturesAtlas` texture sampling is only differentiable with respect to the texture atlas but not differentiable with respect to the barycentric coordinates.
+3. **Face Textures**: In more complex cases such as ShapeNet meshes, there are multiple texture maps per mesh and some faces have texture while other do not. For these cases, a more flexible representation is a texture atlas, where each face is represented as an `(RxR)` texture map where R is the texture resolution. For a given point on the face, the texture value can be sampled from the per face texture map using the barycentric coordinates of the point. This representation requires one tensor of shape `(N, F, R, R, 3)`. This texturing method is inspired by the SoftRasterizer implementation. For more details refer to the [`make_material_atlas`](https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/io/mtl_io.py#L123) and [`sample_textures`](https://github.com/facebookresearch/pytorch3d/blob/main/pytorch3d/renderer/mesh/textures.py#L452) functions. **NOTE:**: The `TexturesAtlas` texture sampling is only differentiable with respect to the texture atlas but not differentiable with respect to the barycentric coordinates.
 diff --git a/docs/tutorials/bundle_adjustment.ipynb b/docs/tutorials/bundle_adjustment.ipynb
index a0501074..20c4f258 100644
--- a/docs/tutorials/bundle_adjustment.ipynb
+++ b/docs/tutorials/bundle_adjustment.ipynb
@@ -36,10 +36,10 @@
"where $d(g_i, g_j)$ is a suitable metric that compares the extrinsics of cameras $g_i$ and $g_j$. \n",
"\n",
"Visually, the problem can be described as follows. The picture below depicts the situation at the beginning of our optimization. The ground truth cameras are plotted in purple while the randomly initialized estimated cameras are plotted in orange:\n",
- "\n",
+ "\n",
"\n",
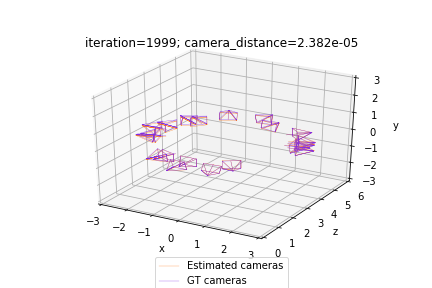
"Our optimization seeks to align the estimated (orange) cameras with the ground truth (purple) cameras, by minimizing the discrepancies between pairs of relative cameras. Thus, the solution to the problem should look as follows:\n",
- "\n",
+ "\n",
"\n",
"In practice, the camera extrinsics $g_{ij}$ and $g_i$ are represented using objects from the `SfMPerspectiveCameras` class initialized with the corresponding rotation and translation matrices `R_absolute` and `T_absolute` that define the extrinsic parameters $g = (R, T); R \\in SO(3); T \\in \\mathbb{R}^3$. In order to ensure that `R_absolute` is a valid rotation matrix, we represent it using an exponential map (implemented with `so3_exp_map`) of the axis-angle representation of the rotation `log_R_absolute`.\n",
"\n",
@@ -167,11 +167,11 @@
},
"outputs": [],
"source": [
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/camera_visualization.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/camera_visualization.py\n",
"from camera_visualization import plot_camera_scene\n",
"\n",
"!mkdir data\n",
- "!wget -P data https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/data/camera_graph.pth"
+ "!wget -P data https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/data/camera_graph.pth"
]
},
{
diff --git a/docs/tutorials/dataloaders_ShapeNetCore_R2N2.ipynb b/docs/tutorials/dataloaders_ShapeNetCore_R2N2.ipynb
index bf6389f4..2650cf37 100644
--- a/docs/tutorials/dataloaders_ShapeNetCore_R2N2.ipynb
+++ b/docs/tutorials/dataloaders_ShapeNetCore_R2N2.ipynb
@@ -112,7 +112,7 @@
"metadata": {},
"outputs": [],
"source": [
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/plot_image_grid.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/plot_image_grid.py\n",
"from plot_image_grid import image_grid"
]
},
diff --git a/docs/tutorials/fit_simple_neural_radiance_field.ipynb b/docs/tutorials/fit_simple_neural_radiance_field.ipynb
index a6616d26..60b43886 100644
--- a/docs/tutorials/fit_simple_neural_radiance_field.ipynb
+++ b/docs/tutorials/fit_simple_neural_radiance_field.ipynb
@@ -126,8 +126,8 @@
"metadata": {},
"outputs": [],
"source": [
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/plot_image_grid.py\n",
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/generate_cow_renders.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/plot_image_grid.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/generate_cow_renders.py\n",
"from plot_image_grid import image_grid\n",
"from generate_cow_renders import generate_cow_renders"
]
diff --git a/docs/tutorials/fit_textured_mesh.ipynb b/docs/tutorials/fit_textured_mesh.ipynb
index 736a832a..5e3913e3 100644
--- a/docs/tutorials/fit_textured_mesh.ipynb
+++ b/docs/tutorials/fit_textured_mesh.ipynb
@@ -155,7 +155,7 @@
},
"outputs": [],
"source": [
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/plot_image_grid.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/plot_image_grid.py\n",
"from plot_image_grid import image_grid"
]
},
diff --git a/docs/tutorials/fit_textured_volume.ipynb b/docs/tutorials/fit_textured_volume.ipynb
index ad5b4604..3cf349ab 100644
--- a/docs/tutorials/fit_textured_volume.ipynb
+++ b/docs/tutorials/fit_textured_volume.ipynb
@@ -106,8 +106,8 @@
"metadata": {},
"outputs": [],
"source": [
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/plot_image_grid.py\n",
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/generate_cow_renders.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/plot_image_grid.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/generate_cow_renders.py\n",
"from plot_image_grid import image_grid\n",
"from generate_cow_renders import generate_cow_renders"
]
diff --git a/docs/tutorials/render_textured_meshes.ipynb b/docs/tutorials/render_textured_meshes.ipynb
index 2f916b26..32074c73 100644
--- a/docs/tutorials/render_textured_meshes.ipynb
+++ b/docs/tutorials/render_textured_meshes.ipynb
@@ -154,7 +154,7 @@
},
"outputs": [],
"source": [
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/plot_image_grid.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/plot_image_grid.py\n",
"from plot_image_grid import image_grid"
]
},
diff --git a/projects/nerf/README.md b/projects/nerf/README.md
index e3ae2958..e941903d 100644
--- a/projects/nerf/README.md
+++ b/projects/nerf/README.md
@@ -3,12 +3,12 @@ Neural Radiance Fields in PyTorch3D
This project implements the Neural Radiance Fields (NeRF) from [1].
-
diff --git a/docs/tutorials/bundle_adjustment.ipynb b/docs/tutorials/bundle_adjustment.ipynb
index a0501074..20c4f258 100644
--- a/docs/tutorials/bundle_adjustment.ipynb
+++ b/docs/tutorials/bundle_adjustment.ipynb
@@ -36,10 +36,10 @@
"where $d(g_i, g_j)$ is a suitable metric that compares the extrinsics of cameras $g_i$ and $g_j$. \n",
"\n",
"Visually, the problem can be described as follows. The picture below depicts the situation at the beginning of our optimization. The ground truth cameras are plotted in purple while the randomly initialized estimated cameras are plotted in orange:\n",
- "\n",
+ "\n",
"\n",
"Our optimization seeks to align the estimated (orange) cameras with the ground truth (purple) cameras, by minimizing the discrepancies between pairs of relative cameras. Thus, the solution to the problem should look as follows:\n",
- "\n",
+ "\n",
"\n",
"In practice, the camera extrinsics $g_{ij}$ and $g_i$ are represented using objects from the `SfMPerspectiveCameras` class initialized with the corresponding rotation and translation matrices `R_absolute` and `T_absolute` that define the extrinsic parameters $g = (R, T); R \\in SO(3); T \\in \\mathbb{R}^3$. In order to ensure that `R_absolute` is a valid rotation matrix, we represent it using an exponential map (implemented with `so3_exp_map`) of the axis-angle representation of the rotation `log_R_absolute`.\n",
"\n",
@@ -167,11 +167,11 @@
},
"outputs": [],
"source": [
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/camera_visualization.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/camera_visualization.py\n",
"from camera_visualization import plot_camera_scene\n",
"\n",
"!mkdir data\n",
- "!wget -P data https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/data/camera_graph.pth"
+ "!wget -P data https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/data/camera_graph.pth"
]
},
{
diff --git a/docs/tutorials/dataloaders_ShapeNetCore_R2N2.ipynb b/docs/tutorials/dataloaders_ShapeNetCore_R2N2.ipynb
index bf6389f4..2650cf37 100644
--- a/docs/tutorials/dataloaders_ShapeNetCore_R2N2.ipynb
+++ b/docs/tutorials/dataloaders_ShapeNetCore_R2N2.ipynb
@@ -112,7 +112,7 @@
"metadata": {},
"outputs": [],
"source": [
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/plot_image_grid.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/plot_image_grid.py\n",
"from plot_image_grid import image_grid"
]
},
diff --git a/docs/tutorials/fit_simple_neural_radiance_field.ipynb b/docs/tutorials/fit_simple_neural_radiance_field.ipynb
index a6616d26..60b43886 100644
--- a/docs/tutorials/fit_simple_neural_radiance_field.ipynb
+++ b/docs/tutorials/fit_simple_neural_radiance_field.ipynb
@@ -126,8 +126,8 @@
"metadata": {},
"outputs": [],
"source": [
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/plot_image_grid.py\n",
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/generate_cow_renders.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/plot_image_grid.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/generate_cow_renders.py\n",
"from plot_image_grid import image_grid\n",
"from generate_cow_renders import generate_cow_renders"
]
diff --git a/docs/tutorials/fit_textured_mesh.ipynb b/docs/tutorials/fit_textured_mesh.ipynb
index 736a832a..5e3913e3 100644
--- a/docs/tutorials/fit_textured_mesh.ipynb
+++ b/docs/tutorials/fit_textured_mesh.ipynb
@@ -155,7 +155,7 @@
},
"outputs": [],
"source": [
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/plot_image_grid.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/plot_image_grid.py\n",
"from plot_image_grid import image_grid"
]
},
diff --git a/docs/tutorials/fit_textured_volume.ipynb b/docs/tutorials/fit_textured_volume.ipynb
index ad5b4604..3cf349ab 100644
--- a/docs/tutorials/fit_textured_volume.ipynb
+++ b/docs/tutorials/fit_textured_volume.ipynb
@@ -106,8 +106,8 @@
"metadata": {},
"outputs": [],
"source": [
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/plot_image_grid.py\n",
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/generate_cow_renders.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/plot_image_grid.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/generate_cow_renders.py\n",
"from plot_image_grid import image_grid\n",
"from generate_cow_renders import generate_cow_renders"
]
diff --git a/docs/tutorials/render_textured_meshes.ipynb b/docs/tutorials/render_textured_meshes.ipynb
index 2f916b26..32074c73 100644
--- a/docs/tutorials/render_textured_meshes.ipynb
+++ b/docs/tutorials/render_textured_meshes.ipynb
@@ -154,7 +154,7 @@
},
"outputs": [],
"source": [
- "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/master/docs/tutorials/utils/plot_image_grid.py\n",
+ "!wget https://raw.githubusercontent.com/facebookresearch/pytorch3d/main/docs/tutorials/utils/plot_image_grid.py\n",
"from plot_image_grid import image_grid"
]
},
diff --git a/projects/nerf/README.md b/projects/nerf/README.md
index e3ae2958..e941903d 100644
--- a/projects/nerf/README.md
+++ b/projects/nerf/README.md
@@ -3,12 +3,12 @@ Neural Radiance Fields in PyTorch3D
This project implements the Neural Radiance Fields (NeRF) from [1].
- +
+ Installation
------------
-1) [Install PyTorch3D](https://github.com/facebookresearch/pytorch3d/blob/master/INSTALL.md)
+1) [Install PyTorch3D](https://github.com/facebookresearch/pytorch3d/blob/main/INSTALL.md)
- Note that this repo requires `PyTorch` version `>= v1.6.0` due to dependency on `torch.searchsorted`.
2) Install other dependencies:
diff --git a/website/pages/en/index.js b/website/pages/en/index.js
index d0e69b83..7f6806d7 100644
--- a/website/pages/en/index.js
+++ b/website/pages/en/index.js
@@ -135,7 +135,7 @@ loss_chamfer, _ = chamfer_distance(sample_sphere, sample_test)
Installation
------------
-1) [Install PyTorch3D](https://github.com/facebookresearch/pytorch3d/blob/master/INSTALL.md)
+1) [Install PyTorch3D](https://github.com/facebookresearch/pytorch3d/blob/main/INSTALL.md)
- Note that this repo requires `PyTorch` version `>= v1.6.0` due to dependency on `torch.searchsorted`.
2) Install other dependencies:
diff --git a/website/pages/en/index.js b/website/pages/en/index.js
index d0e69b83..7f6806d7 100644
--- a/website/pages/en/index.js
+++ b/website/pages/en/index.js
@@ -135,7 +135,7 @@ loss_chamfer, _ = chamfer_distance(sample_sphere, sample_test)
-
- Install PyTorch3D (following the instructions here)
+ Install PyTorch3D (following the instructions here)
-
Try a few 3D operators
diff --git a/website/pages/en/users.js b/website/pages/en/users.js
index 3168efca..222da708 100644
--- a/website/pages/en/users.js
+++ b/website/pages/en/users.js
@@ -19,7 +19,7 @@ class Users extends React.Component {
return null;
}
- const editUrl = `${siteConfig.repoUrl}/edit/master/website/siteConfig.js`;
+ const editUrl = `${siteConfig.repoUrl}/edit/main/website/siteConfig.js`;
const showcase = siteConfig.users.map(user => (
